Was lange währt wird endlich Drucker…
techik : microcontroller : techik : reprap
Dienstag, 2. April 2013
 Wie versprochen hier die Fortsetzung über den Baufortschritt des MendelMax.
Wie versprochen hier die Fortsetzung über den Baufortschritt des MendelMax.
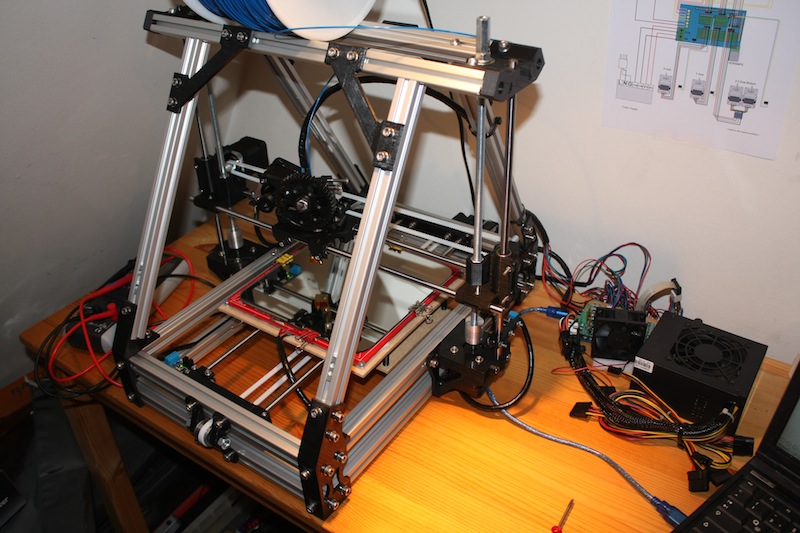
Letztes Wochenende konnte ich den Drucker noch samt Mechanik zusammenstellen und soweit vorbereiten dass nur noch die optischen Endstops, der Extruder und die restliche Elektronik angebaut werden müssen. Davor musste ich noch etwas Zeit investieren damit der Rahmen tatsächlich sauber rechtwinkelig ist, hier ist Geduld und Genauigkeit gefragt, die Kunststoffteile an den Ecken sind halt eben nur aus Kunstoff.
Unter der Woche fand ich an ein paar Abenden Zeit mich der Elektronik zu widmen. Betrieben wird der MendelMax von einem Arduino Mega 2560 mit einem aufgesetzten RAMPS (RepRap Arduino Mega Pololu Shield).
 Meine Version des RAMPS ist 1.3, das bedeutet eine überschaubare Menge an Einzelteilen die auf die Platine gelötet werden. Beim RAMPS 1.4 sind lediglich die Widerstände und Kondensatoren als SMD Bauteile ausgeführt, im Gegensatz zur Version 1.3.
Meine Version des RAMPS ist 1.3, das bedeutet eine überschaubare Menge an Einzelteilen die auf die Platine gelötet werden. Beim RAMPS 1.4 sind lediglich die Widerstände und Kondensatoren als SMD Bauteile ausgeführt, im Gegensatz zur Version 1.3.
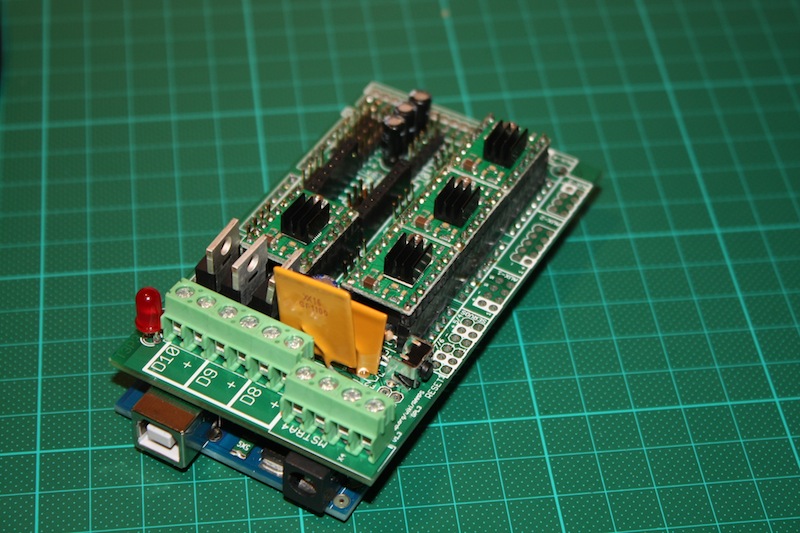
Zusätzlich zu dem RAMPS müssen noch die 4 Pololu Stepper Driver Boards zusammengelötet werden, die dann auf dem RAMPS Platz finden. Dies beschränkt sich aber auf ein paar Stiftleisten, hier sollte man nur auf die Ausrichtung achten, damit die Pololus nachher klaglos in die Sockel passen. Selbiges trifft im Übrigen auch auf das RAMPS zu, das nachher sauber in die Sockel des Arduino Mega passen sollte.
 Die Logik, sprich das Arduino wird mit 5 Volt versorgt, für die Schrittmotoren, sowie das beheizte Druckbett und den Extruder braucht es etwas mehr. Hier verwende ich ein 400 Watt Computernetzteil. Dieses sollte zumindest in der Lage sein 16 Ampere zu liefern und wird über die Schraubklemmen am RAMPS doppelt angeschlossen.
Die Logik, sprich das Arduino wird mit 5 Volt versorgt, für die Schrittmotoren, sowie das beheizte Druckbett und den Extruder braucht es etwas mehr. Hier verwende ich ein 400 Watt Computernetzteil. Dieses sollte zumindest in der Lage sein 16 Ampere zu liefern und wird über die Schraubklemmen am RAMPS doppelt angeschlossen.
Als Firmware für das Arduino habe ich jetzt mal Sprinter aufgespielt, möchte mir aber in weiterer Folge Marlin ansehen. Auf dem Host habe ich Printrun installiert. Damit kann der Drucker über G-Codes gesteuert werden.
Zukunftsvision wäre hier einen Raspberry Pi einzusetzen, der via http gesteuert wird und als Host dient. Beim Recherchieren habe ich da schon einiges im Netz dazu gefunden, allein es fehlt an der Zeit…
 Am Osterwochenende stand dann das Konfigurieren der Firmware sowie das Kalibrieren des Druckers an, unterbrochen durch familiäre Verbindlichkeiten, die sich an solchen Feiertagen nunmal ergeben.
Am Osterwochenende stand dann das Konfigurieren der Firmware sowie das Kalibrieren des Druckers an, unterbrochen durch familiäre Verbindlichkeiten, die sich an solchen Feiertagen nunmal ergeben.
Also wurden die Opto-Endstops ausgerichtet, sowie das Druckbett in eine absolut Waagrechte in Relation zum X-Schlitten gebracht, um eine konstante Entfernung der Extruderspitze zum Druckbett auf allen X/Y Koordinaten zu gewährleisten.
Weiters gilt es die notwendigen Motorsteps pro Millimeter zu ermitteln, sowie die genaue Extruder Geschwindigkeit festzustellen, damit genau die richtige Menge Filament durch das Hotend gedrückt wird. Hotend bezeichnet man die beheizte Düse am Ende des Extruders. Diese erwärmt das Filament bis es als zähflüssige Masse durch das nachkommende Material herausgepresst werden kann.
 Hilfreich bei der Kalibrierung, darum möchte ich es hier nicht vorenthalten, war Triffid Hunter’s Calibration Guide.
Hilfreich bei der Kalibrierung, darum möchte ich es hier nicht vorenthalten, war Triffid Hunter’s Calibration Guide.
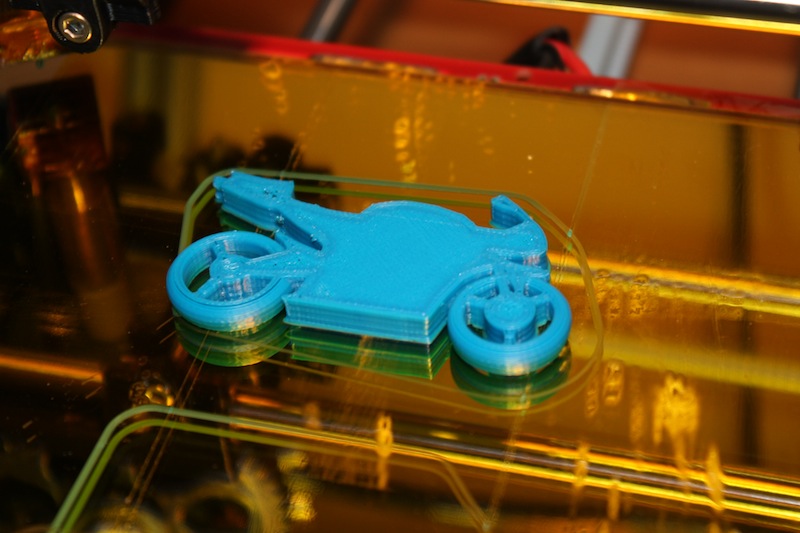
Danach ging es ab zu Thingiverse um passende Objekte für die ersten sauberen Druckversuche zu finden.
Es ist noch nicht alles perfekt eingerichtet, aber jetzt sind es nur noch Kleinigkeiten bzw. Parameter die geändert werden müssen. Aber im großen und ganzen bin ich sehr zufrieden mit dem Ergebnis bisher. Es ist schon ein faszinierendes Gefühl auf diese Art Dinge herstellen zu können, einfach so…
Wenn alles richtig sauber läuft werde ich wohl als erstes Ersatzteile für meinen Drucker drucken, bzw. einige Dinge verbessern. Unter anderem möchte ich auf der Y-Achse einen besseren Riemenspanner, sowie die Endstop Halter und Endstop Trigger etwas optimieren. Auch der Idler für die X Achse bedarf einiger Veränderungen. Ich habe festgestellt, dass da doch sehr viel Bewegung drin ist, die besser nicht da sein sollte.
Hier noch ein Video-Zusammenschnitt der ersten halbwegs sauberen Teile.
So, stay tuned…
Warning: Attempt to read property "comment_content" on null in /home/.sites/338/site1783/web/blog/wp-includes/comment-template.php on line 1024Kategorien
- astronomie (1)
- darts (1)
- fotografie (2)
- techik (9)
- hardware (5)
- internet (1)
- microcontroller (4)
- reprap (2)
- software (2)
Tags
Archiv
- Juni 2014 (1)
- August 2013 (1)
- Juni 2013 (2)
- April 2013 (2)
- März 2013 (5)
 @AlfredNitsch
@AlfredNitsch